Default Features
Lane Keeping Assist
Automatic Emergency Brake
Active Collision Avoidance
Adaptive Cruise Control
Auto Parking Assist
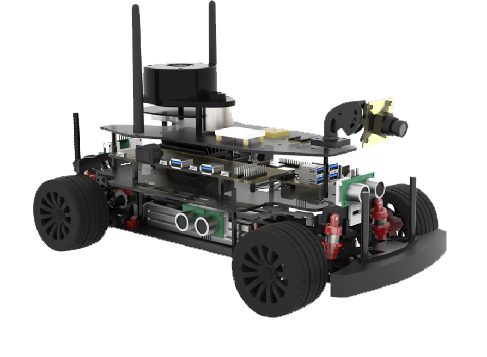
 Vehicle Parameters
Vehicle ParametersVehicle Size: Length * Width * Height ≥ 423 * 190 * 180mm
Vehicle Weight: about 3Kg;
Overall Architecture: Electronic Control, Rear Wheel Drive, Independent Suspension;
Battery Parameters: 4200mAh; (last for 2-3 hours)
Computing Unit: Raspberry Pi 4B+
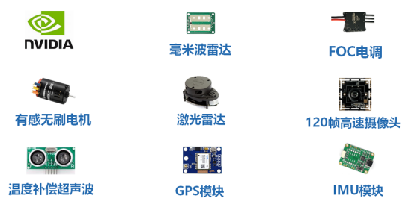
Perception: Ultrasonic Radar
Perception: Camera Module
Perception and Positioning: LiDAR
Positioning: GPS + BD dual-mode
Positioning: IMU Sensor
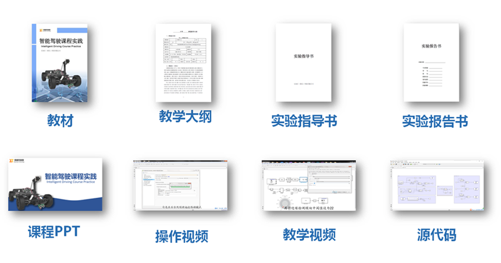
Supporting Materials: Teaching materials, experimental instructions, experimental reports and source code, can do 30 kinds of practical training competition projects

 The Configuration Instructions of Intelligent Driving Training Low Speed Unmanned Vehicle
The Configuration Instructions of Intelligent Driving Training Low Speed Unmanned VehiclePerception hardware: 16-line lidar, millimeter-wave radar, camera
Communication hardware: automotive-grade CAN communication, gigabit network interaction platform.
Positioning hardware: dual antenna RTK module, module navigation.
Computing hardware: Multi redundant supercomputing embedded platform (NVIDIA Jetson AGX Xavier/Huawei MDC).
Platform hardware: automotive-grade by-wire chassis platform.
Interactive content: 15.6-inch interactive large screen, professional learning and development applications.
Teaching PointsStructural principle: by-wire chassis, sensor, computing platform structural principle
Algorithm development: tracking, computer vision, SLAM, information fusion
Function test: AEB test, ACC test
Assembly and calibration: sensor, HMI, Installation and calibration of computing platforms
Fault detection: power failure, communication failure

● Successfully held five sessions
● In 2022, more than 450 teams followed the deer track, 7 academicians and more than 120 industry experts jointly assisted, and more than 750 foreign media broadcasted it.
● Functional unmanned vehicle challenge, 27 universities, 20+ teams, complete 10 scene tasks such as pedestrian and vehicle travel, pedestrian crossing, and fixed-point delivery.
 The Configuration Instructions of Intelligent Driving Training Passenger Cars
The Configuration Instructions of Intelligent Driving Training Passenger CarsVehicle size: 3070*1870*2000
Battery capacity: 31.9kwh, range 250km
Positioning hardware: NavBox 2.0
Computing power hardware: 2 × Xavier
Perception hardware: 3 × Lidar, 5 × Camera
Interactive content: mobile APP, extended SDK interface, vehicle cloud interface.
Teaching PointsThrough the industrial computer + standard interactive interface, all sensor data of the original vehicle can be called, and control commands can be issued, so as to focus on the research of cutting-edge algorithm teaching and disassembly, fault diagnosis, calibration of perception sensors such as lidar, functional realization and operation of L4 level automatic driving, reading and communication of key core parameters of automatic driving and wire-controlled vehicles, and L4 intelligent connected vehicle testing.

● Based on advanced technologies in the intelligent transportation industry such as autonomous driving, intelligent connected connection and vehicle-road coordination, an experimental section of vehicle-road coordination was built on the campus of the university.
● Through the by-wire modification of the vehicle, intelligent perception sensors such as lidar are equipped on the vehicle, and algorithms such as perception recognition, path planning, and decision-making control of the autonomous driving vehicle are applied to realize the L4 automatic driving function of the intelligent driving platform vehicle in limited scenarios.
● The intelligent driving platform vehicle can realize the autonomous driving display on campus, the test of vehicle-road collaborative application scenarios, the update and iteration of the autonomous driving algorithm and the teaching application of students.

 Official Wechat
Official Wechat
 i-VISTA Wechat
i-VISTA Wechat

 i-VISTA Microblog
i-VISTA Microblog

 i-VISTA Tik Tok
i-VISTA Tik Tok

 i-VISTA TouTiao
i-VISTA TouTiao
Copyright reserved by China Automotive Engineering Research Institute Co., Ltd. (Stock code: 601965)
Y ICP B 08002516-1 YGGSWB ZI 013